Parameters
Generic parameters
water depth
Input from the client. It may be calculated as the average value of the typical water blade. Used in ROV in calculations for hoisting, lowering and duration bringing on deck.
Units: meters
Type: integer
Valid Range: 0 < value
Source: commercial team (derived in QGIS from bathymetry data, generally speaking)
Used in class ‘RovModel’ of operational_model.py.
source line interval
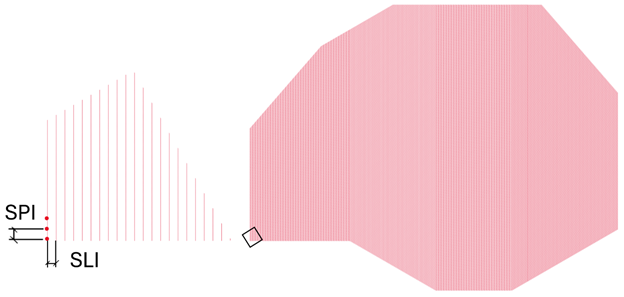
Also called source XL (cross line) distance or SLI. It’s the distance between consecutive source lines.
Units: meters
Type: float
Valid Range: (Min: ?, Max: ?)
Source: client
Note: Currently, this parameter is only used in the function ‘progress_map’ in plotter.py. We can probably remove it from the excel workflow. Nonetheless, it is a key parameter in the QGIS workflow.
source point interval
Also called source IL (in line) distance or SPI. It’s the distance between consecutive shooting points of the same source line.
Units: meters
Type: float
Valid Range: (Min: ?, Max: ?)
Source: client
Used in classes ‘FixedIntervalsAcquisition’ of acquisition.py and ‘SimulationResults’ of simulation_results.py
receiver line interval
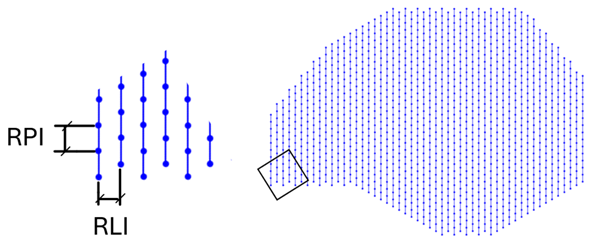
Also called source XL (cross line) distance or RLI. It’s the distance between consecutive receiver lines.
Units: meters
Type: float
Valid Range: 0 < value
Source: client
Used in classes ‘NoarModel’ of operational_model.py and in the progress_map function of plotter.py.
receiver point interval
Also called source IL (in line) distance o RPI. It’s the distance between consecutive receiver points (node placements) of the same receiver line.
Units: meters
Type: float
Valid Range: 0 < value
Source: client
Used in class ‘FixedIntervalsAcquisition’ of acquisition.py and by the DescriptorTemplate hiden sheet of MantaDesign.
SRC Polygon Irregularity
It’s the estimated irregularity of the source polygon.
Units: meters
Type: float
Valid Range: 0 ≤ value
Source: calculated manually by the commercial team, see more information later in this document
Used solely to add extra time to the source line change.
Source Vessel parameters
source start day
It’s the desired day for the vessel to start working. Establishing it at 0 will make the vessel start working right away. If the value is, for example, 10, the vessel will start as soon as day 10 is reached in the project. Before that, it will show as if in a ‘wait’ state in the timeline.
Units: days
Type: integer
Valid Range: 0 ≤ value
Source: ?
Used in…
source end day
It’s the desired day for the vessel to finish working. Establishing it at None will make the vessel work until there is no work left. If the value is, for example, 100, the vessel will stop as soon as day 100 is reached in the project. After that, it will show as if in a ‘wait’ state in the timeline.
Units: days
Type: integer
Valid Range: 0 < value, or ‘None’
Source: ?
Used in…
source downtime
Also called source technical downtime or source TDT. It’s the estimated percentage of the operational + technical downtime, i.e., time in which the source efforts stop (you are not able to work) due to operational or technical problems. Used in transit operations, and in “operations for sail line and get new time”.
Units: percentage
Type: float
Valid Range: 0 ≤ value ≤ 100
Source: operations team
Used in classes 'SourceModel' of operational_model.py and 'SimulationResults’ of simulation_results.py, and in the sensitivities.
source standby
It’s the estimated percentage of the non-technical downtime, i.e., time in which the source efforts stop (you are not able to work) due to external reasons, not related to operations or technical problems. Some main uses of this downtime are adverse weather conditions and encounters with sea mammals.
Units: percentage
Type: float
Valid Range: 0 ≤ value ≤ 100
Source: operations team
Used in…
source speed
Also called shooting speed. It’s the estimated speed of the source vessel.
Units: knots
Type: float
Valid Range: 0 < value < 5.2
Source: operations team
Used in classes ‘SourceModel’ of operational_model.py and ‘SimulationResults’ of simulation_results.py, and in the sensitivities.
sources per vessel
It’s the number of source strings (arrays of shooting guns?) in each source vessel. If triple, it means we have 3 arrays of guns shooting, so it’s the number of SL being shot in each pass of the source vessel.
Units: None
Type: integer
Valid Range: value ≤ 1 (no upper limit on the code, but the current technology allows a maximum of 6)
Source: operations team
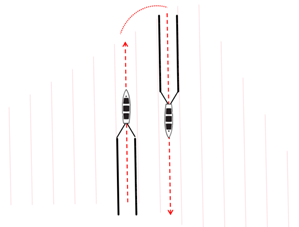
The source vessel sails through the sail lines, which are not necessarily the same as the source lines. If your number of sources per vessel is two, that means having two strings and therefore sailing in the middle of two source lines. This way, sail lines depend on the number of sources per vessel.
Used in classes ‘CrewConfigurationFactory’ of crew_configuration and ‘SimulationResults’ of simulation_results.py
line change duration
Also called ‘source line change’ It’s the estimated time it takes the vessel to move to the next sail line. Sardine adds time to this value using the SRC Polygon Irregularity: TO DO
‘source line change’ += ‘SRC Polygon Irregularity’/’source speed’/1852*60
Units: minutes
Type: float
Valid Range: 0 ≤ value ≤ 5 hours (range after the irregularity is added)
Source: operations
Used in…
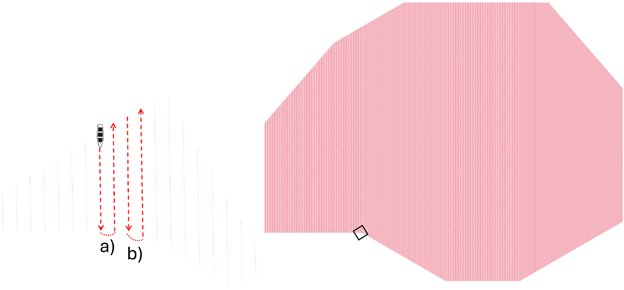
Note: Figure x is not necessarily realistic, as the source vessel sails through the sail lines and not the source lines.
Receiver Vessel parameters
receiver start day
It’s the desired day for the vessel to start working. Establishing it at 0 will make the vessel start working right away. If the value is, for example, 10, the vessel will start as soon as day 10 is reached in the project. Before that, it will show as if in a ‘wait’ state in the timeline.
Units: days
Type: integer
Valid Range: 0 ≤ value
Source: ?
Used in…
receiver end day
It’s the desired day for the vessel to finish working. Establishing it at None will make the vessel work until there is no work left. If the value is, for example, 100, the vessel will stop as soon as day 100 is reached in the project. After that, it will show as if in a ‘wait’ state in the timeline.
Units: days
Type: integer
Valid Range: 0 < value, or ‘None’
Source: ?
Used in…
receiver downtime
Also called receiver technical downtime or receiver TDT. It’s the estimated percentage of the operational + technical downtime, i.e., time in which the receiver efforts stop (you are not able to work) due to operational or technical problems. Used in transit operations, and in “operations for sail line and get new time”.
Units: percentage
Type: float
Valid Range: 0 ≤ value ≤ 100
Source: operations team
receiver standby
It’s the estimated percentage of the non-technical downtime, i.e., time in which the receiver efforts stop (you are not able to work) due to external reasons, not related to operations or technical problems. Some main uses of this downtime are adverse weather conditions and encounters with sea mammals.
Units: percentage
Type: float
Valid Range: 0 ≤ value ≤ 100
Source: operations team
Used in…
rolling speed
Also called transit speed. It’s the estimated speed of the receiver vessel when moving to the next receiver line, having previously recovered (hoisted) the ROV / ROVs. This method of recovering the ROV before moving to another receiver line is called ‘Rolling method’.
Units: knots
Type: float
Valid Range: 0 < value < 30 (30 is the current code limit, but it’s unlikely to have more than 3 knots)
Source: operations team
Used in classes ‘SourceModel’, ‘RovModel’ and ‘NoarModel’ of operational_model.py.
RL change speed
It’s the estimated speed of the receiver vessel when moving to the next receiver line without recovering (hoisting) the ROV / ROVs. This method is chosen over the Rolling method when the RLI is low enough, as ‘RL change speed’ is always going to be lower than the ‘rolling speed’.
Units: knots
Type: float
Valid Range: (Min: ?, Max: ?)
Source: operations team
Used in classes ‘RovModel’ and ‘NoarModel’ of operational_model.py.
ROV winch speed
It’s the estimated speed of the ROV. It’s used in ROV in calculations for hoisting, lowering and duration bringing on deck.
Units: meters/minutes
Type: float
Valid Range: 0 < value
Source: operations team
Used in class ‘RovModel’ of operational_model.py.
RL Per Pass
It’s the number of RLs being deployed or recovered in each pass of the receiver vessel. Currently, It’s the same as the number of ROVs working side by side. Most common approach is having RL per pass = 2. It also affects how many lines are rolled by default in the sequence generator (see section ‘2 Generate Sequence’).
Units: nodes per day
Type: integer
Valid Range: (Min: 1, Max: None)
Source: commercial manager**
Note: The RL Per Pass depends on the technology used. e.g. if we are using MR and ROV (at this stage of the technology of MR), we will have 3 RL per pass (2 with ROV and 1 with MR). At this stage of the development this applies just to the deployment, not to the recovery (2RL per pass, just ROV). This is why in future releases of Sardine we could benefit for having different RL per pass for both the deployment and recovery. Used in classes ‘RovModel’ of operational_model.py and ‘CrewConfigurationFactory’ of crew_configuration.py.
deployment productivity
It’s the estimated productivity of node deployment. A concept important to define is the “Down the line” productivity:
It’s a theoretical estimated productivity on an infinite receiver line with no line changes or downtime. It includes only node deployment and basket runs/returns to deck to replenish nodes. We use this because different projects will have different line intervals, crossline offsets, and sequences, so the distances traveled during receiver line changes will not be consistent, and therefore the average daily productivity including those line changes is not consistent. A down the line number lets us compare projects on the same receiver grid in an apples-to-apples way.
Units: nodes per day
Type: integer
Valid Range: 0 < value
Source: operations team, they used to calculate it using a variety of methods including the ROV Calc sheet, but we now require the input from operations, along with their sign-off.
Used in classes ‘RovModel’ of operational_model.py and ‘SimulationResults’ of simulation_results.py, and in the sensitivities.
recovery productivity
It’s the estimated productivity of node recovery. The concept of “Down the line” productivity works the same way as in deployment productivity, except that is only for recovery. This parameter may be different to deployment productivity.
Units: nodes per day
Type: integer
Valid Range: 0 < value
Source: operations team, they used to calculate it using a variety of methods including the ROV Calc sheet, but we now require the input from operations, along with their sign-off.
Used in classes ‘RovModel’ of operational_model.py and ‘SimulationResults’ of simulation_results.py, and in the sensitivities.
time settling on DP
It’s the estimated time that takes to settle after the rolling method and before lowering. Dynamic Positioning, usually 30min. ??
Units: minutes
Type: float
Valid Range: 0 ≤ value
Source: operations team
Used in classes ‘RovModel’ and ‘NoarModel’ of operational_model.py. Note: the values of ‘rolling speed’, ‘RL change speed’, ‘ROV winch speed’ and ‘time settling on DP’ are not usually modified, although they can be.
Crew Changes parameters
vessel with change
It’s the name of the vessel you want to add the crew change to.
Units: None
Type: string
Valid Range: it must contain the following structure: “source/receiver vessel #number”. The use of lowercase or uppercase letters does not matter.
Source: user
Used in…
first change day
It’s the desired day for the vessel to start making a crew change. If the value is, for example, 10, the vessel will start the crew change right after whichever task it is doing is finished. So the crew change does not currently interrupt a task half way. Instead it waits for the task to finish and begings right after it, lasting for as long as it is specified, considering the ‘last change day’ parameter. Note that this may lead to some crew changes showing not exactly in the day it was asked to. The crew changes show in the timeline with a different color.
Units: days
Type: integer
Valid Range: 0 ≤ value
Source: ?
Used in…
last change day
It’s the desired day for the vessel to finish making a crew change. The logic is explained in the parameter ‘first change day’. Note that the last change day is not included in the crew change.
Units: days
Type: integer
Valid Range: 0 < value
Source: ?
Used in…
Requirements
ID |
Title |
Status |
|---|---|---|
Water depth shall be provided in meters and used in ROV calculations. |
open |
|
Source and receiver intervals (SLI, SPI, RLI, RPI) shall be defined in meters. |
open |
|
Vessel parameters shall include start/end days, downtime, standby, speed, and productivity. |
open |
|
Crew changes shall be defined by vessel name, start day, and end day. |
open |
|
Source polygon irregularity shall be calculated and used to adjust line change durations. |
open |